|
|
|
|
|
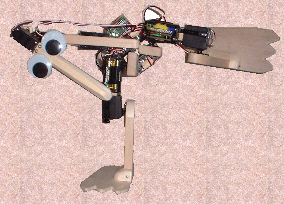
ホンダのアシモはすばらしいですね。いつかはアトムが誕生 することでしょう。 数年前に、入門機として面白いロボットを見つけました。寺崎かづひさんが開発された Weird-7です。 低価格でありながら、二足歩行は当然、蟹歩きや、転倒しても自分で起き上がるという 傑作機です。 私のロボット作りの原点にもなっています。 |
|
します。電子パーツのみいただき、ボディをバルサ材で作るなど、 ちょっぴりオリジナル性を持たせています。 実際には、何十年ぶりかの電子工作で、半田付けの手は震え、 目は見えないやら悪戦苦闘しましたが、老人性痴呆症の進行を かなり遅らせてくれたようです。 可愛いやつを見てやってください。 一本刀 土俵入りだ〜い!! |
|

|
|
||
|
Weird 7をなんとか人型の二足歩行ロボットにすることができました。 |
||
|
|
定年後は悠々自適に…との願いから、悠介と名付けております。 (現実は、なかなか悠々自適とはまいりませんが….) ボディの主要部はアクリル板で、足裏と腕はバルサ材で作って おります。 サーボの反対軸は、アクリル板にナットを加熱して埋め込み、 それを両面テープでサーボに貼り付けるという廉価な手段を 用いています。 Weird
7 は9サーボでしたが、両腕と両足首にサーボを4個 追加して自由度を12としました。それなりにモーションを 増やすことができました。 モーションプログラムの作成は、かなりの根気がいります。 歩かせるにも大変です。体重移動とともに、足の全サーボの 回転角を刻々と変えてやる必要があります。 反動や慣性なども 考慮する必要があります。 |
|
|
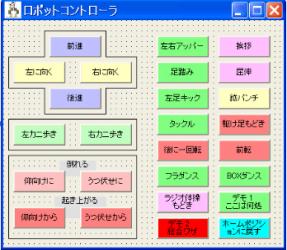
はじめは、データの筆記・添削のくりかえしでしたが、実際に動作させながら、PCの画面でモーションDataが 作れるようにしました。( VBで作成、と言うよりVBしか使えません。汗; )
”転んだら、直ちに起き上がらせる” 等、ロボットの状況に合わせ て適宜、動作させることができます。 その中でも、最も難しかった”前転”の様子を見てやって下さい。 前方に回転するのは出来ても、サーボのパワー不足のためか立ち 上がらせるのがとても難しかったです。 前転完了!! 1ヶ月かかりました。 前転のコマ撮りです。(^o^)丿 |
|
|
|
|
||











|
|
|
||||||
|
|
ID-01は、最新鋭のヒューマノイド(人型)ロボットの あらゆる機能を搭載するために特別に開発された。 ... ID-01は、イタリアのピサにある聖アンナ大学院大学の アーツラボと呼ばれる ... とのうたい文句につられて購読、製作したわけですが、 やや期待はずれの感がします。 ということで、少しずつ改造をしております。改造意欲を そそる点では面白いロボットといえます。(完成度が高いと 何も出来ませんからね。) 以下は私の改造記をご覧いただこうと思います。 なお、製作記は多くの方が自HPやプログで発表されて いますので、ID-01で検索・ご覧ください。 |
|
|||||
|
改造、その1
|
ID-01には、音声認識機能がありますが、どうも闇雲に話し掛け ていては、認識・回答率が悪いようです。 耳のLEDの点滅を見ながら、タイミングを計って話し掛けると 調子が良いです。 しかし、耳のLEDは暗くて見づらい !! そこでプチ改造です。 鼻に見立てて青色発光LEDを付けて視認性を上げました。 私「ID-01!」
ピカピカ ID-01「なんですか?」 私「アクション」 ID-01「OK!」 私「あたま」ピカピカ 私「みぎえ」 ID 頭を右に向ける と、結果は上々です。 |
|
|||||
|
改造、その2
|
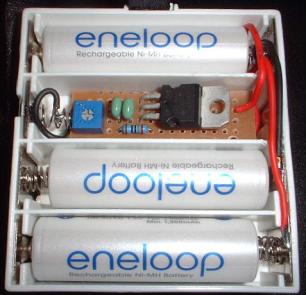
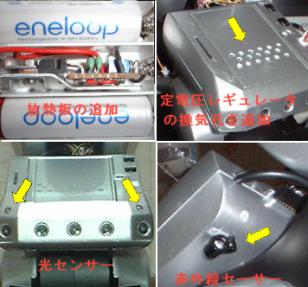
電池は、地球的環境を考えて乾電池のゴミの山を作らないよう にと、当初からエネループを使用しておりますが….、 各種のボード類が増えるに従って、どうも可動時間が短い!! 満充電なのにロジック側の電圧がすぐに低下する。う〜ん! ID-01では使用できなくなった電池をデジカメに移すと十分に 使えるのに…….? 充電直後の電圧は約1.4Vですが、すぐに1.2Vになる!! 充電池は、本来1.2Vですから(1.2×3=3.6V) 当然ですね。 そこで電源の改造です。 電池6本を直列に接続 = 定常電圧7.2Vとし、ロジック系は 定電圧レギュレータで4.5Vとして使用できるようにしました。 充電直後は8.4Vとなるため、ダイオードを直列に入れています。 可動時間は飛躍的に延びました。( 詳細は ”ふみのへやさん” のブログで紹介して頂いております。ご笑覧ください。) |
|
|||||
|
改造、その3
|
ヒューマノイド型ということで、当初より手芸店で購入した 目玉を貼り付けていましたが、鉄腕アトムよろしくサーチ ライト化しました。 黒目の中に高輝度LEDを忍ばせ、ベースのLED回路と 結線しております。 プログラムで点滅させることができます。また、暗闇でも、 なんとかCMOSカメラで写真が撮れました。 なお、目玉は約1mmほど浮かせて、両面テープの小片で貼り つけてありますので、マイクへの弊害はありません。 |
|
|||||
|
改造、その4
|
頭部タッチセンサーの応答がとても悪いです。 機嫌が悪いときは、うんともすんとも応答なしです。 タッチセンサーは静電容量変化を利用したもののようですが、 デリケートと言うか、何と言うか、とにかく不安定です。 ついに業を煮やし、0.2mmのアルミ板で、外部に補助 電極を付けました。(これは、邪道かも….) 補助電極は0.1mmの裸線とともに、両面テープで頭部 に貼り付けています。裸線は内部電極に結線してあります。 結果は良好、100%応答、弊害なし!! でした。 |
|
|||||
|
改造、その5
|
物体回避モード走行中にベースボードが焼損しました。 原因は良く分かりません。多分、我が家が狭すぎるせいです。 (出力TRの焼損から、過電流によることは明らかです。) このモードは、間違っても袋小路では厳禁でしょうね。 意気消沈でしたが、多くの仲間からの励ましのMallを頂き、 ボードを交換・復活することができました。 ここでの改造は、その再発防止対策です。走行用モータ 回路に0.17Aのポリスイッチを付け、過電流が発生したら、 自動的に電源を遮断できるようにしました。 ポリスイッチは速断ヒューズでないことから、まだ不安が残り ます。そこで、ポリスイッチの温度上昇に着目、ID-01のお尻に 付いている温度センサーを移設・利用、ポリスイッチの温度を PCの画面でモニターリングできるようにしました。 さらに、プログラムで常温以下は走行O.Kとするならば、 完璧な対策といえるのではないでしょうか? |
|
|||||
|
改造、その6,7,8,9
|
まったくのプチ改造ですが…. 定電圧レギュレータの発熱対策として、定電圧ICのコレクター に放熱板の取付けと、バッテリーボックスの蓋に換気孔を設け ました。 これで、レギュレータ部の温度上昇を約60℃程度に押さえる ことができました。 ブレッドボード上の光センサーと赤外線センサーを組込みました。 (ブレッドボード上では格好がとれませんよね!!) 赤外線センサーは、バッテリーボックスの下面に付けて、方向 転換時における後輪の左右の障害物をキャッチできるようにして います。 |
|
|||||
|
改造、10
|
この度は、ちょっとした改造といえるでしょう。 ID-01の肘の関節は、人間が曲げてやらなければ曲がりません。 しかも曲げる時に、バキバキとなんとも嫌な音がします。 また、前輪よりも前にある物体を掴みに行く時は、予め真直ぐに 伸ばしておく必要があります。しかし、伸ばしたまま腕を下げると 前輪に当たってしまいます。 なんとも中途半端な ! と思うのは、私だけでしょうか? どうも我慢できず、RCヘリコプター等で使われているリンクを 利用して、腕の上げ下ろしに合わせて腕が伸びるようにしました。 (
二の腕との間で平行リンクになっているわけです。) ストレートパンチのごとく、とても調子が良いです。 |
|
|||||
|
改造、11
|
右腕に三本指が付きました。 が…、しかし…. 片側の指しか動きません。指を閉じた形が気に入りません。 固定した物を掴もうとすると、偏芯によるムリがかかります。 日本の設計者ならば、これだけの仕掛けを作りながら、こんな ことは決してしなかったでしょう。 …で、またまたリンク機構による両指の開閉化を行いました。 リンクは平座金と虫ピンをハンダ付けした手製です。たった リンク一個の追加で、納得できるものになりました。 ( なお、左手のグーパンチは、紙粘土製です。) |
|
|||||
|
改造、12
|
今度こそは大作です。 ”しゃべる口” ならぬ ”口パク” 化しましたよ!! ID-01の音声に合わせて、口が動きます。シリコンOリングの ような軟らかい口として、「クチャ、クチャ」と動かしたかったの ですが、まぁ ヨシ!! としています。 仕掛けは、Q-STEERのステアリング部品を利用しています。 音声出力で電磁石を駆動、口に付けた永久磁石がそれに反発する 力を応用したものです。 詳細は、ふみのへやさんのブログに掲載して頂いています。 よろしければご覧ください。 |
|
|||||
|
改造、13
|
ID-01に、赤外線式の学習リモコン機能が付きました。 これは優れもので、良かったです。 学習させると、ID-01から、あらゆる赤外線リモコン方式の家電 や機器がコントロールできます。 また、その逆で、TVやエアコンのコントローラーで、ID-01の コントロールも可能です。 ただし、腕にユニットを差し込むという形態が気に入らなく、 腕に組み込みました。 これで、赤外線機能を温存しつつ、ハンドツールも付けることが できます。 |
|
|||||
|
改造、14
|
このところ赤外線に、のめりこんでいます。 ID-01に任意の言葉を発声させたくて、PCから赤外線を利用 した音声伝送を試みてみました。 送信側は、赤外発光LED 5個、1.3V 120mA 受信側は、赤外線フォトトラセンジスター 2個 試作結果 実用通信距離:3m 、通信範囲:ID-01に向かって±60°です。 通信距離・範囲に欠点があるものの、テキスト読み上げから演歌 まで、”口をパクバクさせて発声する様は、面白いものです。 |
|
|||||
|
改造、15
|
またまた、赤外線に凝っています。 定位置に設置した赤外線発光源をID-01にサーチさせて、見つけ させられないか?
と云う発想です。 いわゆる、道標、道しるべ、はたまたランドマーカーと言った ところでしょうか…. このためには、赤外発光LEDをダイナミック点灯させて、赤外線 の到達距離をかせぐ必要があり、ちょっと むずいです。 時間がかかりそうです。 約1ヶ月の試行錯誤、とりあえず赤外線受光部を作りました。 耳に組み込みました。頭を左右に振らせて赤外線の発光源をキャッチ させる魂胆です。 赤外線発光源は余ったTVのコントローラーを利用する!! (手抜き ? 汗…) |
|
|||||
|
改造16
|
簡易プログラムを組み、テストの結果、そこそこに良い感じです。 約5m先で、赤外線を発光→「見つけました」と応えます。 実際の走行テストの前に、小刻みで頻繁な方向転換によるベース ボードの焼損を懸念して、モータードライブ回路に専用のドライブ ICを追加しました。 ( 過去に、物体回避走行で焼損!! 涙 ) これで、軟弱なオリジナル回路への負荷は、フォトカプラーのみ となり、燃えようがないでしょう。 電源は充電池と直結としましたが、仮に駆動輪がロックされても 専用ドライブICの安全機能が働くことで安心です。 |
|
|||||
|
改造17
|
デジタルコンパスを搭載してみました。 デジタルコンパスとは電子式の方位計で、方位信号が3ビットで 出力されます。これをID-01のGPIOに入力し軌道修正走行させよう という分けです。 なかなかと面白いです。 とは言うものの、最初はID-01からの漏洩磁力や、我が家における 南北方向と地磁気的方位とは大きく相違があるなどで実用にならない 無駄なものを……….と悩みました。 漏洩磁気については、デジコンモジュールを頭上100mmに掲げる ことでなんとかなりました。 地理上の方位と地球の磁極とは地球の自転軸の傾き、緯度によって 地磁気のベクトルが異なるためだそうで、状況に合わせてデジコン モジュールを回わして調整することにしました。 旋回しながら8方位を「北 ! 北です」等と発声させることができ ました。また、南に直進→180°旋回→北に直進→180°旋回、元の 位置に戻ってきます。 今、四角形や多角形ルートの走行プログラムを試行錯誤中です。 |
|
|||||
|
改造18 超大作 秘書ロボット化への挑戦 パソコンをID-01の外部頭脳として使い、「会話」「Wikipedia検索」「スケジュール確認」「時間確認」 「家電制御」をさせようという作戦です。 こんな大それた挑戦は私の能力だけではできませんが、毎日コミュニケーションズ社発行のPLUS ROBOT vol.01に、その詳細が公開されております。もとはI-SOBOT用ですが、応用させていただきました。 利用するソフトウェアは、すべて無償で入手できます。(素晴らしい) ハード面は、赤外線通信機器が必要に なりますが、手持ちのPCのみでも随分と楽しめます。 とくにお気に入りは、「Wikipedia検索」です。言葉で「××とは」と問い掛けると、検索して音声で答えて くれます。( 赤外線音声伝送と口ぱくの相乗効果が良いです。)
この他、「会話ファイル」にID-01への命令を 組み込むことによって、面白いことができます。 詳細は、PLUS ROBOTでググッテみてください。 ここでは、私の行った改造のみ述べます。 首の回転(Pan)速度を約3倍にしました。 「今、何時?」の問い掛けに対して、頭を旋回・腕時計を見る仕草の後、「○○時○○分です。」と音声で答える というシナリオも、ID-01は首の回転がとても遅くって興ざめです。思い切って荒治療をした結果、小気味 よく動くようになりました。 歯車を1個、抜く!! という荒業です。最高は5倍速ほどになって速すぎるためVRで速度 調節ができるようにしました。(2009.05改良) 当然ながら、消費電流も増大することからモーターのドライブも専用ICに変更しました。
電源直結回路での消費電流 改善前 150〜180mA 改善後 250〜270mA |
|
||||||
|
|
|
|
|||||
|
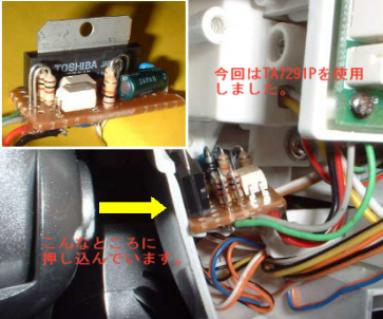
歯車を1個抜き、減速比を下げた モータドライブ回路は、こんなところに押し込んでいます。 赤外線リモコンの通信距離の改善 パソコン用学習リモコンPC-OP-RS1を使用して、ID-01と通信するわけですが、通信距離がなんと 約10cmと短く、動き回るID-01とはほとんど通信できません。 ID-01には学習リモコンが搭載されており、テレビのリモコンでも7mも離れたところからコントロール できるのに!! 大枚5K円も払ったのに!! なんでや〜 と言いたいです。 こうなったら改造するしかありません。 でも、改造例はどこにもありません。 分解して基板と 睨みっこすること3日、 やりました。 改善できました。 その後、さらに改善(2009/12) 通信可能距離は約7m、通信範囲もQ-STEERの赤外線LEDに替えて約120°となりました。 小生の狭い部屋では、赤外線か乱反射するのか? 距離も角度も全く気にしなくても良いようになりました。 BUFFALOさんごめんなさい!! 自己責任での改造ですので….、 4チャンネル目を犠牲にして( 4チャンネルがパターンカットしやすい)、3 チャンネルからの信号で後付けの TR・赤外線発光ダイオードを駆動しております。 |
|||||||
|
|
|
|
|||||
|
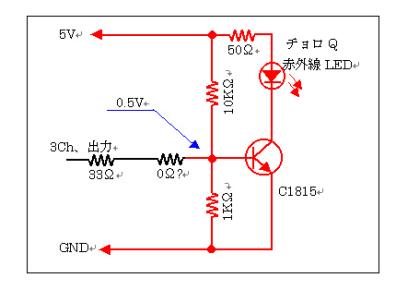
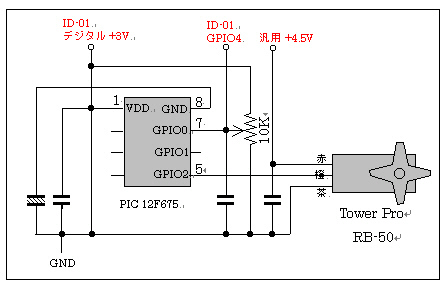
改造説明図です。(2009/12改良図) 赤外線LEDの取付け(2009/12改良) 注) 同様に改造される場合は、あくまでも自己責任でお願いします。
左手首を回転させる!! “手首を回して、腕時計を覗き込む” の仕草を想定し、PICとマイクロサーボを 用いて改造しました。
アセンブル、書き込みと、相当の時間を 費やしましたが、何とかなりました。 成せば成る! 何事も… ですね
しかし、サーボは小型になりましたねぇ 重さはなんと5gです。 (右側の基板は、この改造には関係のない IR関連です。) ID-01のGPIOからの信号でコントロールしています。 High(+3 V)で手首が回転し、Low(0V)で元に戻るように しました。 (特別な信号は不要です。ここが、ミソかな ? (^。^)) |
|
||||||
|
|
|
||||||
|
北京オリンピックの応援には、間に合いませんでした。グスン(-_-;) だんだんと、秘書ロボットに近づいてきました。 できました!! 秘書ロボット化 アクションVer.1 今何時? ID-01の応答&アクションが遅くって調整していましたが、こんなところで妥協です。(~_~メ)
私の「今、何時?」の問い掛けに、腕時計(オメガ、紙製)を覗き込んで「○○時○○分です。」と 答えます。 その他にも、いろいろと応答します。 ドラゴンズに喝!
(燃えよドラゴンズ) 2008/09 手首が回転できるようになったので、応援バットを振らせてみました。
全モータを同時に動かしたら電池の発熱で、電池ボックスが損傷!!
電流計を搭載しました。 |
|
||||||























|
|
|
|
|
いい大人が、いやお爺が、I-SOBOTを買ってしまいました。 これは玩具といえども、素晴らしい 出来映えです。 さすがは日本人!! いい仕事のものですねぇ〜 改造の余地がありません。 せいぜい、けたたましい音声の緩和対策ぐらいでした。 (発泡プラスチック板をスピーカーの前に付けました。) 剣舞もどきをさせてみました。(他のブログでは、なんと 弓をきりりと絞り、矢まで放つようにプログラムされた方も みえるようです。) しかも、ID-01の1/5以下の価格!! 素晴らしい!! |

